|
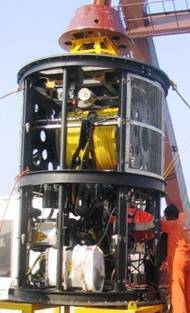
Specifications:
Operration depth - 6000 m
Dimensions - 2,53 x 1,8 x 1,5 m
Weight - 3080 kg in air ( - 20 kg in
water)
Payload - 150 kg
Propulsion system - 7 electrical
thrusters (2 mid-flight, 2 lag, 3 vertical)
Power supply - 6,6 kV (three-phase),
460 Hz
Cameras - 5 pcs.: 2 color, 1 B&W, 2
mini-cams. on manipulators
Manipulators - 2 pcs.: 7 degrees of
freedom and maximum payload 150 kg 5 degrees of freedom and maximum payload 450
kg
Lights - 6 lamps (led and halogen)
Speed, up to - 2,5 knots (forth), 2,0
knots (back), 2,0 knots (lag) 1,5 knots (vertical up & down)
Number of channels for data and video
transmission - 12 (through 2 single-mode optical fibers)
High-precision navigation system:
* Inertial navigation system
* Hydroacoustic navigation system
* Doppler velocity log
* Depth sensor
* Sound velocity probe
* Multibeam echosounder with forward
looking and bottom-looking sonar regimes |